3D Teknologi inom Laparoskopi
Välj en kategori eller underkategori

3D – en spännande teknologi
- Bättre precision och noggrannhet
- Reducerar operationstiden
- Bättre ergonomi
- Kortare inlärningskurva
Non-robotic 3D vs 2D in laparoscopic general surgery
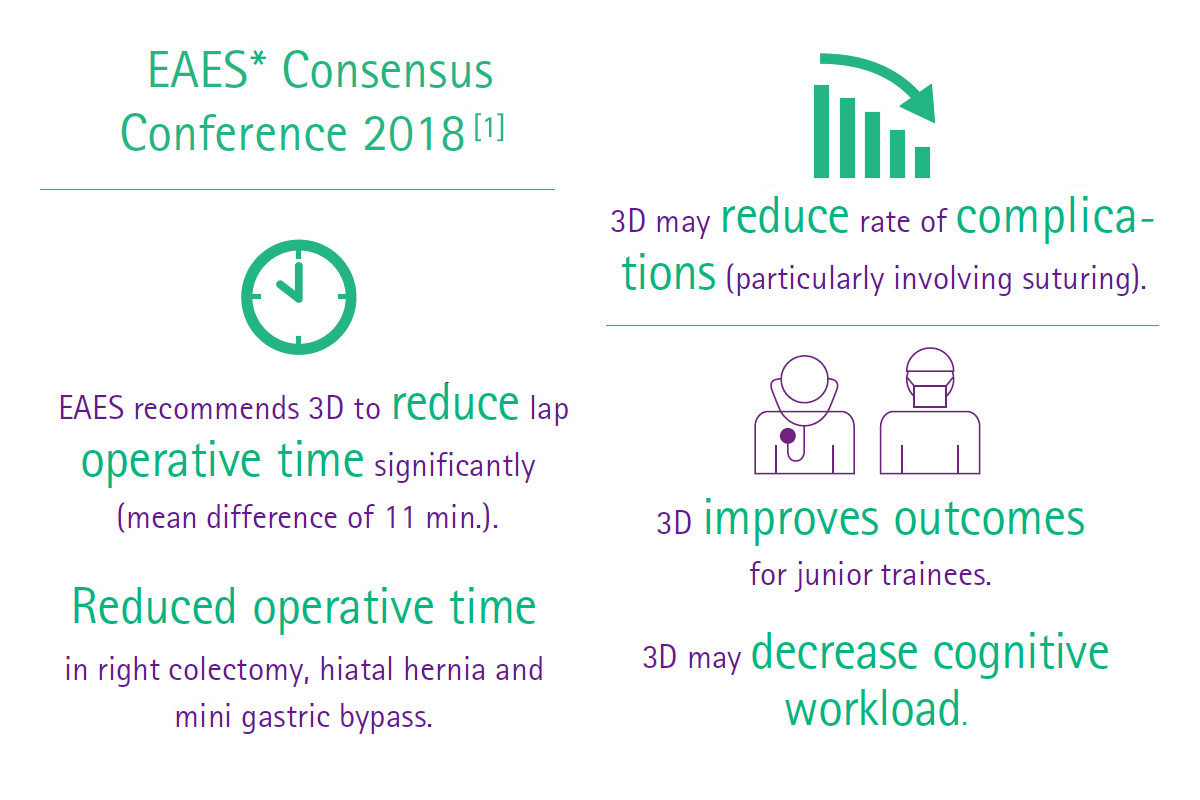
* Recommendations/suggestions by EAES = Endoscopic Association for Endoscopic Surgery
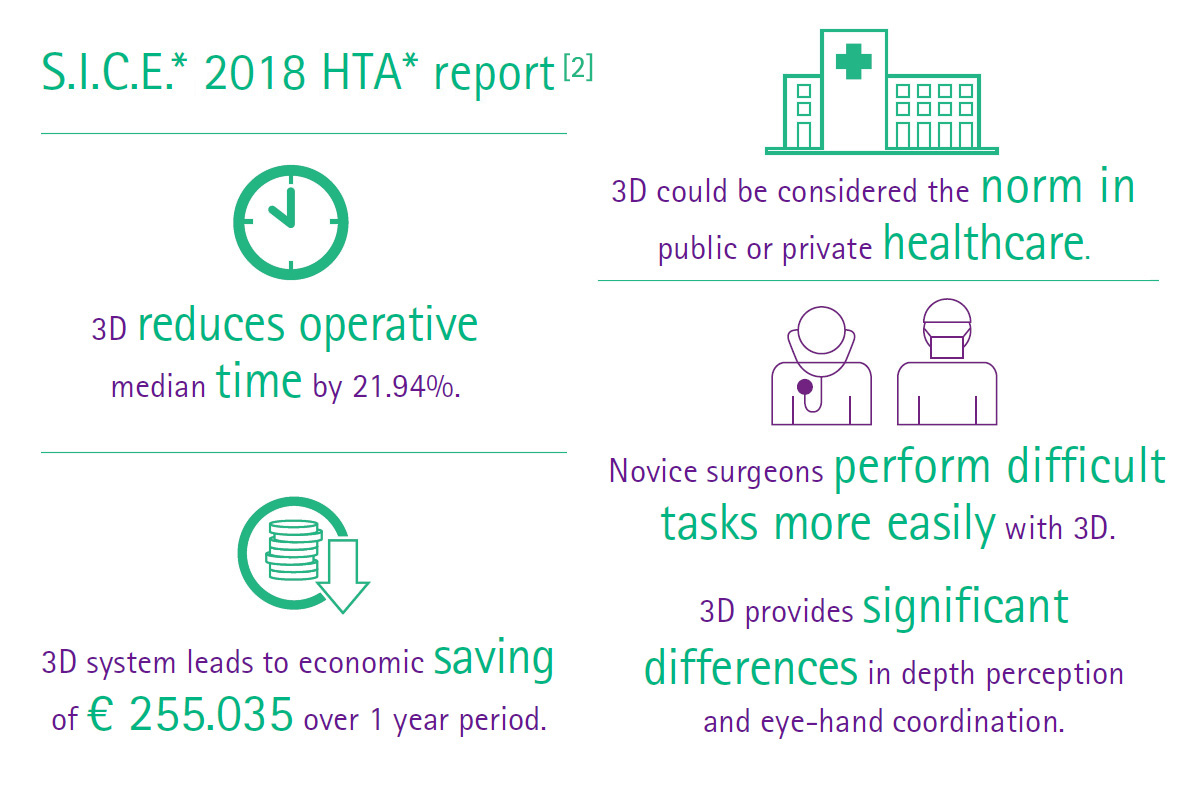
* Recommendations/suggestions by S.I.C.E. = Società Italiana de Chirurgia Endoscopia e Nuove Tecnologie; HTA = Health Technology Assessment
* Recommendations/suggestions by EAES = Endoscopic Association for Endoscopic Surgery
* Recommendations/suggestions by S.I.C.E. = Società Italiana de Chirurgia Endoscopia e Nuove Tecnologie; HTA = Health Technology Assessment
Lär dig mer om 3D
Hur fungerar 3D?
3D står för tredimensionell och är synonymt med stereoskopiskt seende. En av fördelarna med att ha två ögon är möjligheten till djupseende. Eftersom avståndet mellan våra ögon är ca 7-8 cm så ser respektive öga lite olika bilder när vi tittar på ett objekt. När bilderna når visuella cortex så slås de direkt ihop av hjärnan och tolkar informationen med hänsyn till den tredje dimensionen. Andra ledtrådar som hjälper hjärnan att bearbeta djupuppfattningen är perspektiv, skuggning, blixt, färg, relativ storlek osv.
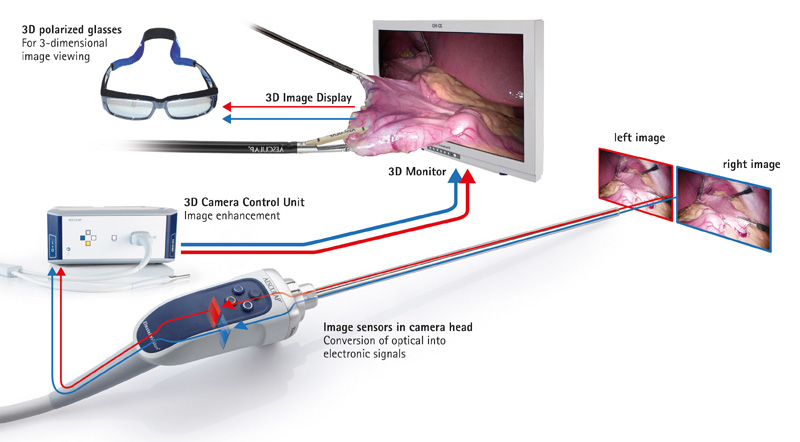
Aesculap EinsteinVision® 3.0 kamerasystem använder dessa egenskaper för att skapa en 3D-bild. Under operationen fångar två HD-sensorer i kamerahuvudet två bilder från en annan synvinkel som simulerar de olika perspektiven på vänster och höger öga. Dessa bilder bearbetas och visas på en 3D-skärm som ger skarpa och ljusa 3D-bilder. Betraktaren måste ha 3D-glasögon för att skapa en illusion av rumsligt djup. Dessa signaler måste nå hjärnan samtidigt med separata kanaler, vilket möjliggörs med 3D-glasögon.
Vad är skillnaden mellan aktiva och passiva 3D-glasögon?
3D-glasögon kan delas in i två primära tekniker, aktiva (slutare) och passiva (polariserade) glasögon. Båda teknikerna är olika metoder för att skicka två stereoskopiska halvbilder för varje öga separat till hjärnan.
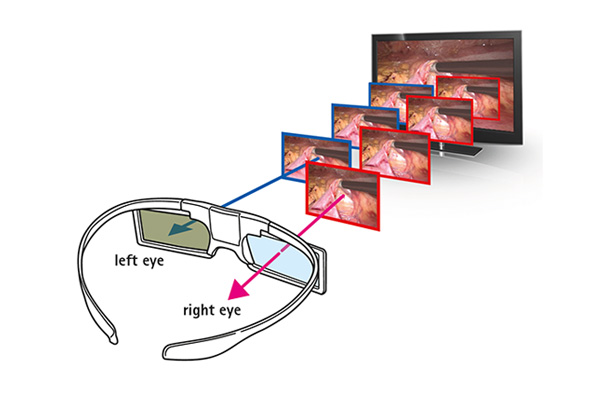
Aktiva 3D-glasögon öppnar och stänger linser med flytande kristaller elektroniskt över varje öga, synkroniserade med 3D-skärmen. När bildskärmen levererar en bild till vänster öga täcker 3D-glasögon det högra ögat så att endast det vänstra ögat ser bilden på monitorn, och vice versa för det andra ögat. Processen upprepas så snabbt att den nästan inte kan upptäckas för tittaren. Nackdelen med aktiva 3D-glasögon är att de är batteridrivna för att driva slutarfunktionen och kommunikationen och synkroniseringen med 3D-skärmen. Föreställ dig vad som kan hända om slutarglasögonens batteri tar slut halvvägs genom operationen. Förutom batteriets extra vikt är slutarglasögonen också dyrare än deras passiva motsvarigheter.
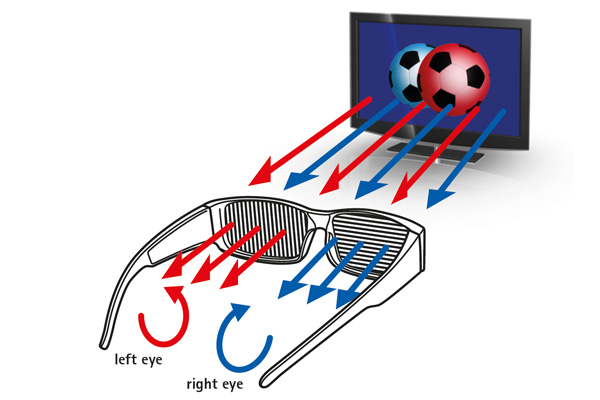
Passiva polariserade 3D-glasögon har ett annat filtreringssystem för ögonen vilket innebär att varje öga bara ser bilden som är avsedd för just det ögat men samtidigt, till skillnad från slutarglasögon. Glasögonen har polariserade filter som är orienterade vinkelrätt mot varandra. Dessa polariserande filter tillåter ljus från olika polariseringar. Varje öga uppfattar en bild som och hjärnans tolkning av de två bilderna resulterar i 3D-effekten.
Passiva 3D-glasögon behöver cirkulärpolariseras eftersom först då kan tittaren luta huvudet från sida till sida utan att 3D-bildens kontrast och ljusstyrka påverkas.
Eftersom polariserade 3D-glasögon inte behöver batterier för att skapa en illusion av en 3D-bild är det inget problem att växla mellan 2D- och 3D-bild på skärmen och numera är den passiva tekniken den rådande för just medicinska applikationer.
Vilken sterilprocess är den bästa för visuella 3D-komponenten?
Fram till nyligen fanns det två alternativ tillgängliga för sterilisering av ett kamerasystem. Det första alternativet är autoklavering. Detta inkluderar vanligtvis endoskopet och ibland också kamerahuvudet om det inte är draperat med ett sterilt skydd. Nackdelen med autoklavering är den termiska påverkan på produkten på grund av hög temperatur (134 ° C). Detta resulterar ofta i en kortare produktlivslängd och ökade investeringskostnader eftersom ytterligare kamerahuvuden behöver köpas under en definierad tidsperiod. En annan nackdel är att på grund av den nödvändiga autoklaveringstiden kräver ett sjukhus vanligtvis flera kamerahuvud för att klara av en normal operationsdag. Detta ökar investeringskostnaderna avsevärt. Fördelen är att autoklavering är en standardprocess som finns på nästan varje sjukhus.
Det andra alternativet är Sterrad, en plasma-sterilisator med låg temperatur som kräver väteperoxid för steriliseringsprocessen. Det finns olika typer av Sterrad-sterilisatorer tillgängliga. Fördelen är att den totala steriliseringscykeln, inklusive transport, vanligtvis är betydligt kortare jämfört med autoklavering eftersom Sterrad-sterilisatorerna inte behöver placeras i stericentralen utan kan placeras närmare operationsavdelningen. Detta minskar investeringskostnaden eftersom det kanske inte är nödvändigt att köpa flera kamerahuvud. Nackdelen kan vara att den typ av Sterrad-sterilisator som krävs för att bearbeta 3D-komponenter inte är tillgänglig på sjukhuset.

På grund av dessa befintliga nackdelar introducerade Aesculap ett innovativt sterilt koncept - EinsteinVision® steril engångsoptik som hermetiskt tätar det kompletta 3D-endoskopet, kamerahuvudet och dess kabel. Det används som en steril barriär mellan patient och kamerasystem. Konceptet är enkelt: en patient, en drapering!
Fördelarna är:
- Processen - ingen förändring i befintlig praxis med en steril drapering
- Användning – kameran finns alltid på laparoskopivagnen och är redo för operation
- Kvaliteten – det integrerade glasskyddet på den distala änden av den sterila draperingen ger en klar bild av operationsfältet
- Patienten - den sterila draperingen är latexfri och minskar risken för korskontamination
- Budgeten - med högst två kameror (0 °, 30 °) kan alla procedurer utföras
- Besparingarna - inga kostnader för sterilprocesser
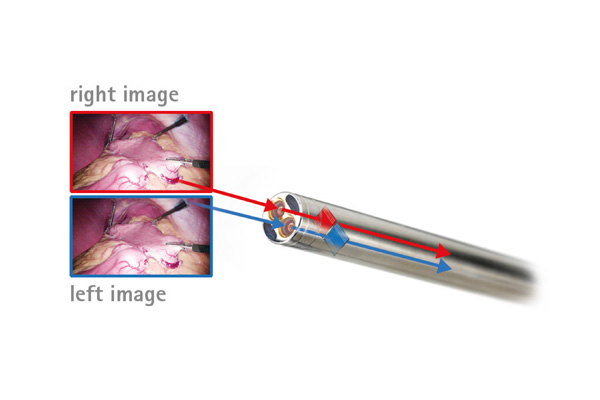
Chip-on-the-tip eller konventionella 3D-kameror – vad är skillnaden?
Chip-on-the-tip 3D-kamerasystem
3D chip-on-the-tip endoskop, är i jämförelse med traditionella kameror en relativt ny teknologi, där två bildsensorer är placerade i den distala änden av endoskopet. Bilden som genereras i det distala objektivets lins leds till de två sensorerna som konverterar de optiska signalerna till elektroniska signaler för att sedan skicka dem till kamerahuvudet via kablar. Därifrån överförs de stereoskopiska signalerna till kamerans styrenhet och vidare till 3D-monitorn där de visas med olika polariseringsvinklar till vänster och höger öga. De passiva 3D-glasögonen gör det möjligt för tittaren att få intrycket av en tredimensionell bild.
Optiska komponenter och gränssnitt i endoskopet ersätts av signalkablar. Detta minskar kamerans totala vikt. Vanligtvis är chip-on-the-tip-system en “allt-i-ett” kamera med endoskoplösning utan möjlighet att fokusera bilden. Ljuskabeln är integrerad i kamerasystemet.
På grund av den givna 10mm ytterdiametern för 3D-kamerasystemet och det faktum att två sensorer behöver monteras i endoskopets distala spets är bildsensorns storlek betydligt mindre jämfört med ett konventionellt 3D-kamerahuvud. Därför är sensorens ursprungliga bildupplösning vanligtvis lägre än Full HD (1080 rader i horisontell upplösning) och måste uppskalas till Full HD-kvalitet.
Djupuppfattning är en viktig funktion för stereoskopisk bildvisning. Endast en god djupuppfattning ger intrycket av en naturlig 3D-bild. Chip-on-the-tip-kamerasystemet med sin tekniska lösning ger endast ett begränsat bilddjup som vanligtvis resulterar i en mindre imponerande 3D-känsla.
Mindre sensorer har en reducerad pixelstorlek vilket vanligtvis resulterar i en högre nivå av störande bildbrus. Därför är det fördelaktigt att ha större sensorer i kameran.
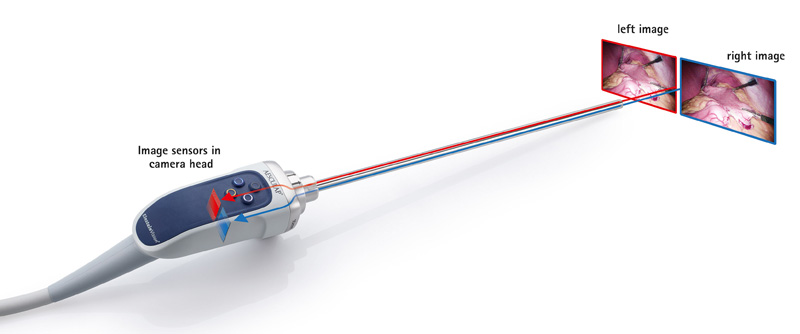
Konventionella 3D-kamerasystem
Ett ”konventionellt” system, som Aesculap EinsteinVision® 3D-kamerasystem, består av ett styvt stereoendoskop som innehåller glasstavslinser och med målet att transportera bilden från endoskopets distala spets till de två bildsensorerna som finns i kamerahuvudet. Härifrån är flödet av 3D-information liknande som beskrivs i chip-in-the-tip-kameran. De viktigaste skillnaderna mot chip-on-the-tip-systemet är:
- De två bildsensorerna som placeras i kamerahuvudet är väsentligt större i storlek. Detta är mycket fördelaktigt för att få ett lågt bildbrus.
- Fokusområdet är vanligtvis bredare jämfört med chip-on-the-tip kamerasystem
- Bildupplösningen ger inbyggd Full HD (1080 rader horisontellt). Därför behövs ingen uppskalningsprocess eftersom den fullständiga upplösningen redan finns på sensorn
- Den extra vikten för stånglinssystemet och är försumbar jämfört med kamerahuvudets totala vikt
Skulle det inte vara trevligt att titta på 3D-innehåll utan att behöva bära 3D-glasögon??

I slutändan är det detta som många tror kommer att vara nästa steg i 3D-tekniken. Därför pågår en hel del utveckling för att föra så kallade autostereoskopiska skärmar till marknaden. Dessa 3D-skärmar kan redan ses i vissa smarta telefonenheter eller kommersiella bildskärmssystem och experter antar att denna teknik snart kommer att hitta sin väg in i det medicinska fältet.
